Project
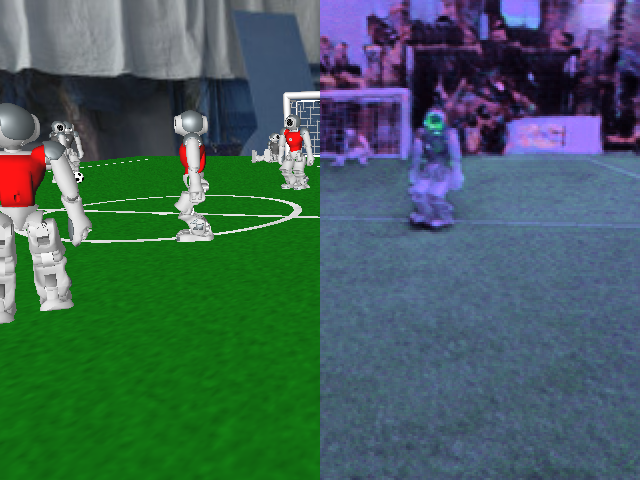
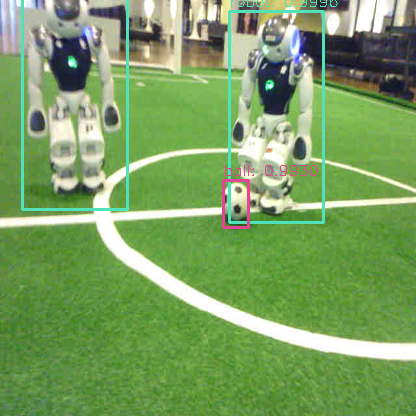
Real-time object detection and avoidance for autonomous Nao Robots performing in the Standard Platform League
A classic object detection algorithm is combined with a relatively tiny deep neural network, which makes it possible to increase the reliability.